
產品簡介PRODUCT DESCRIPTION
多機器人協同控制開源平臺
聯系電話:13720126958 / 13387619634平臺簡介
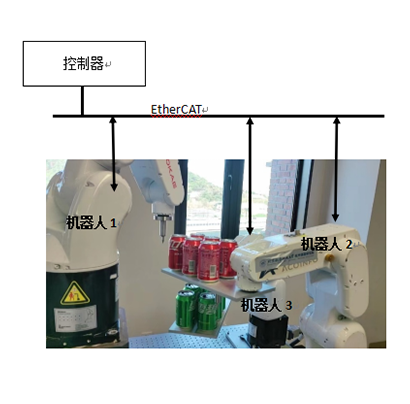
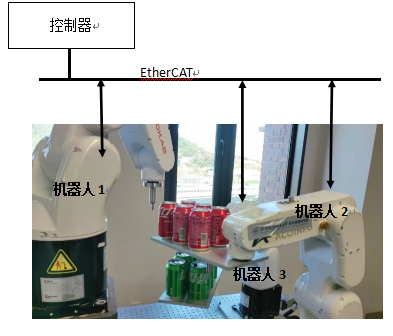
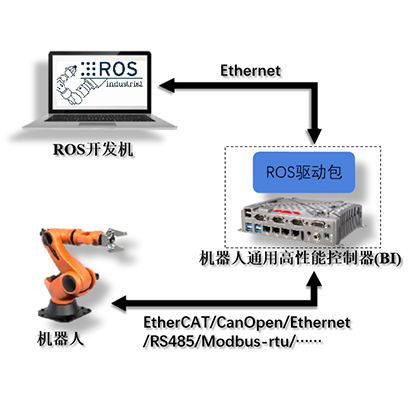
由于自主研發的智能通用控制器可支持多機器人控制,因此采用一臺控制器同時控制三臺機器人。EtherCAT總線通信,采用EtherCAT主站,通信周期1ms。
產品特點
1、提供多機協作示例代碼、運動學及動力學模型、軌跡規劃代碼
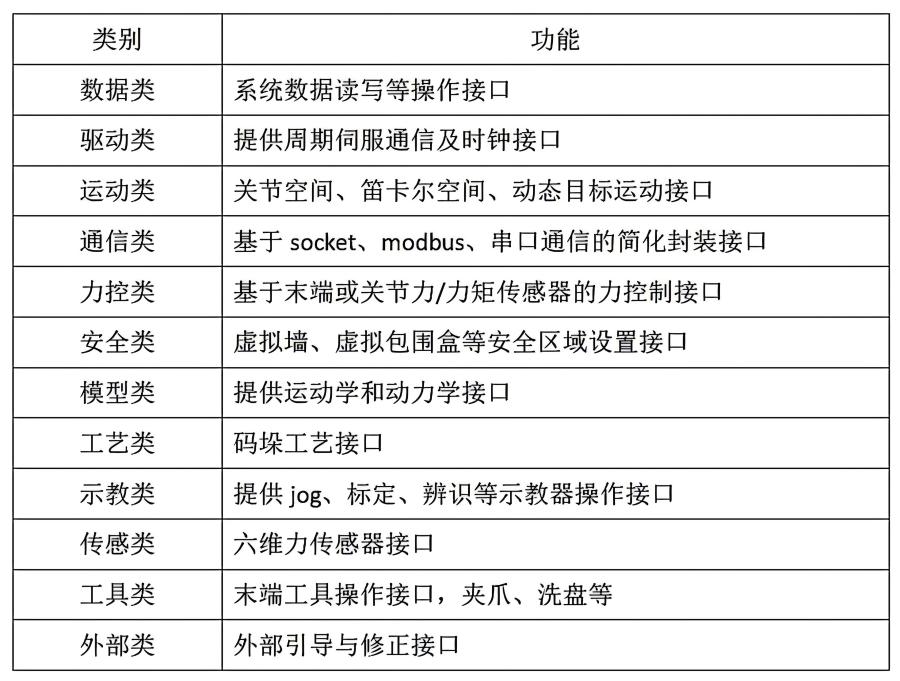
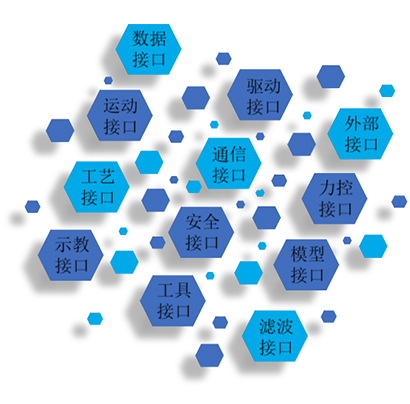
2、提供各層次c/c++二次開發接口:
提供了多類功能接口,供用戶應用或開發使用。用戶可以利用這些功能接口編寫應用程序,也可以利用SDK進行二次開發使用。具體接口詳解。功能類別如下:
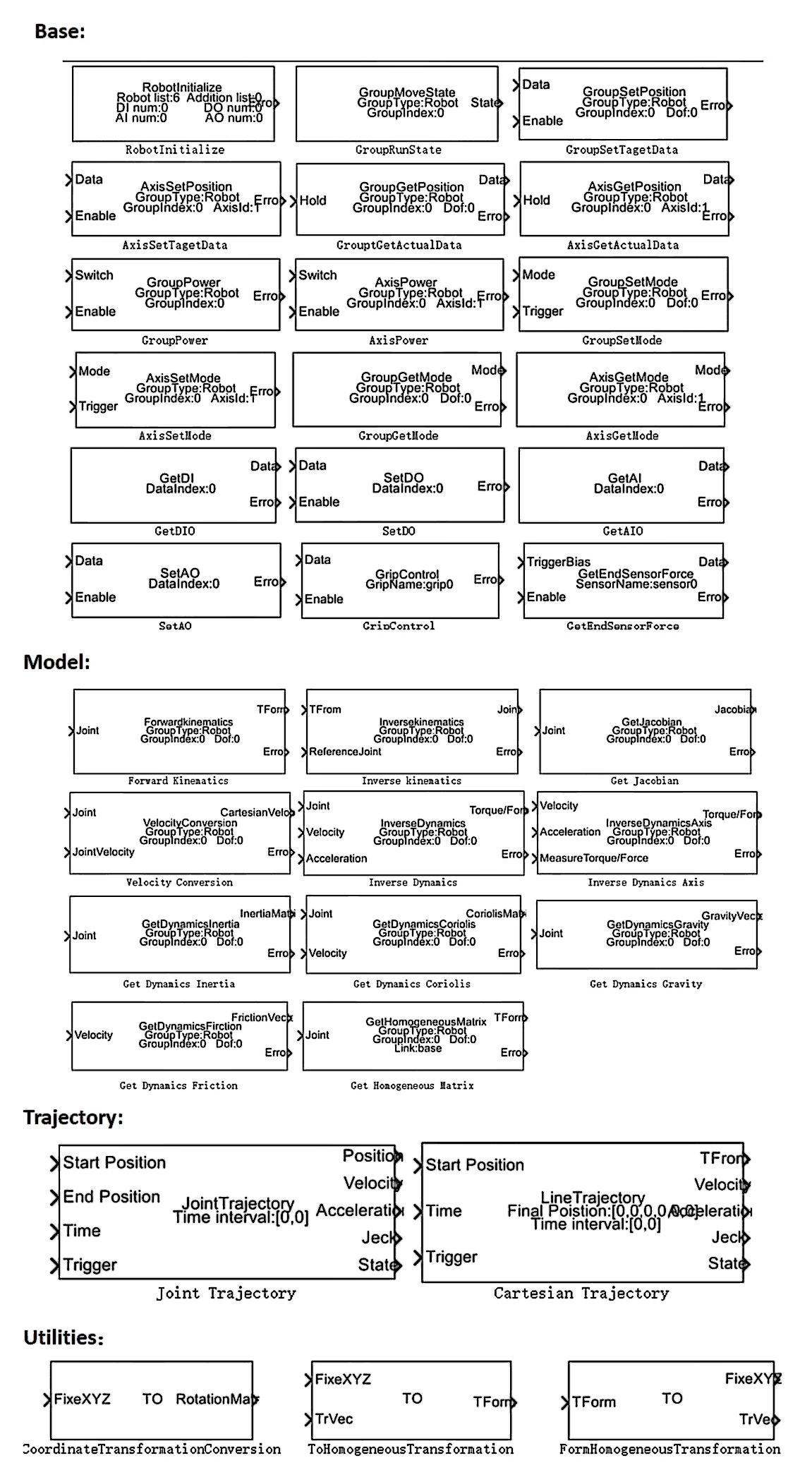
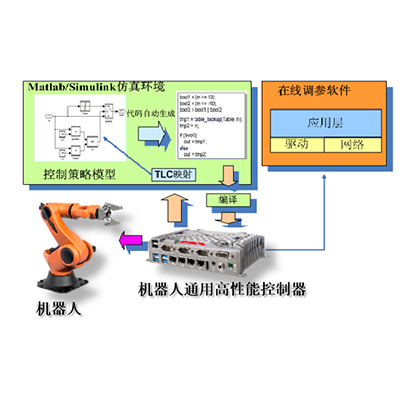
3、提供各層次matlab開發模塊:
支持的研究方向:
1、一致性協同控制方法研究:探討多機械臂系統中的一致性問題,如靜態位置一致性、速度一致性,以及在存在未知擾動時的抗干擾控制策略。
2、智能任務決策方法研究:應用深度強化學習算法,如DDPG(深度確定性策略梯度),解決機械臂在復雜環境中的協同裝配任務。
3、協同控制策略研究:開發多任務協同策略,如基于DTW-GMM(動態時間規整-高斯混合模型)的策略,以提高多機械臂系統的靈活性和效率。
4、實時控制算法研究:開發能夠在有限信息傳遞下實現實時控制的算法,以適應帶寬和通信限制。
5、機械臂的協同時延控制方法研究:研究雙機械臂或多機械臂間的協同控制方式,以及通過延時指令和IO通訊模型來提高流水線生產的靈活性。





客戶服務電話:
027-87018711
 掃描二維碼關注我們
掃描二維碼關注我們
聯系電話:李經理 13720126958 陳經理 13387619634 郵箱:wheckert@126.com
公司地址:湖北省武漢東湖新技術開發區關東街道湯遜湖北路36號武漢理工大科技園新能源研發基地2棟08層801
版權所有 ©2019-2050 武漢艾克特科技有限公司 鄂ICP備19030040號-1