
產(chǎn)品簡介PRODUCT DESCRIPTION

Delta并聯(lián)機器人實訓平臺
聯(lián)系電話:13720126958 / 13387619634主要展示內(nèi)容:
1,通過PC式視覺系統(tǒng)或智能相機(無需電腦)進行快速在線檢測和自動分揀,協(xié)議傳遞坐標給機器人。
2,在該單元上,學生可以學習并聯(lián)機器人編程、視覺系統(tǒng)編程和設(shè)置、機器人與視覺系統(tǒng)協(xié)同等。(同時可以加裝多套機器人進行多機器人協(xié)同作業(yè))。
3,了解傳送帶跟蹤的原理,并了解如何去降低動態(tài)抓取的誤差。
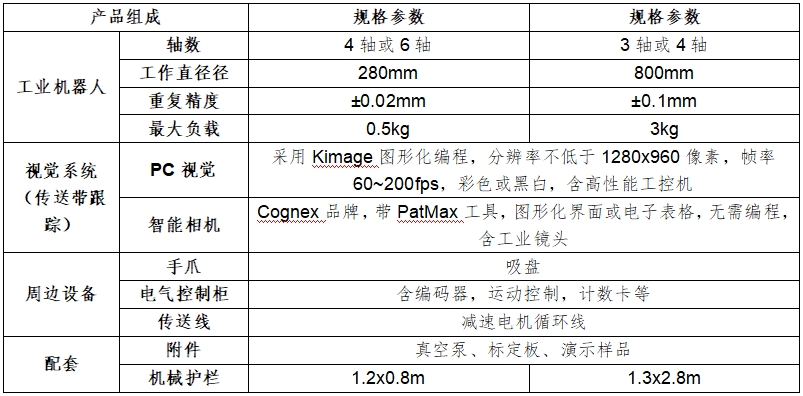
注: 型號中X代表Delta機器人軸數(shù),X=3、4、6。
相關(guān)產(chǎn)品推薦RELATED PRODUCTS





客戶服務(wù)電話:
027-87018711
 掃描二維碼關(guān)注我們
掃描二維碼關(guān)注我們
聯(lián)系電話:李經(jīng)理 13720126958 陳經(jīng)理 13387619634 郵箱:wheckert@126.com
公司地址:湖北省武漢東湖新技術(shù)開發(fā)區(qū)關(guān)東街道湯遜湖北路36號武漢理工大科技園新能源研發(fā)基地2棟08層801
版權(quán)所有 ©2019-2050 武漢艾克特科技有限公司 鄂ICP備19030040號-1